CNN总结
应用场景:
- 图像(二维矩阵数据)特征提取
概括
- 卷积核滑呀滑
核心参数
kernel size(卷积核大小=3x3):无论图像多大,parameters只取决于kernel size和fitter数量paddle(填充大小):1.每次卷积都会减小图片大小,卷不了几次图片就会变得非常小;2.边缘的像素被使用的次数少stride(滑动步长=1)max/avg pooling:进一步缩小图片大小,特征放大
特色/亮点
参数共享:在图像的一部分有用的特征检测器(例如垂直边缘检测器)可能在图像的另一部分有用。与全连接相比大大减小了模型参数。(平移不变性)
稀疏连接:在每一层中,每个输出值仅取决于少量输入。例如卷积核3x3则任何输出只与对应的9个输入数字有关。需要存储的参数更少,不仅减少了模型的存储需求,而且提高了它的统计效率。这也意味着为了得到输出我们只需要更少的计算量。
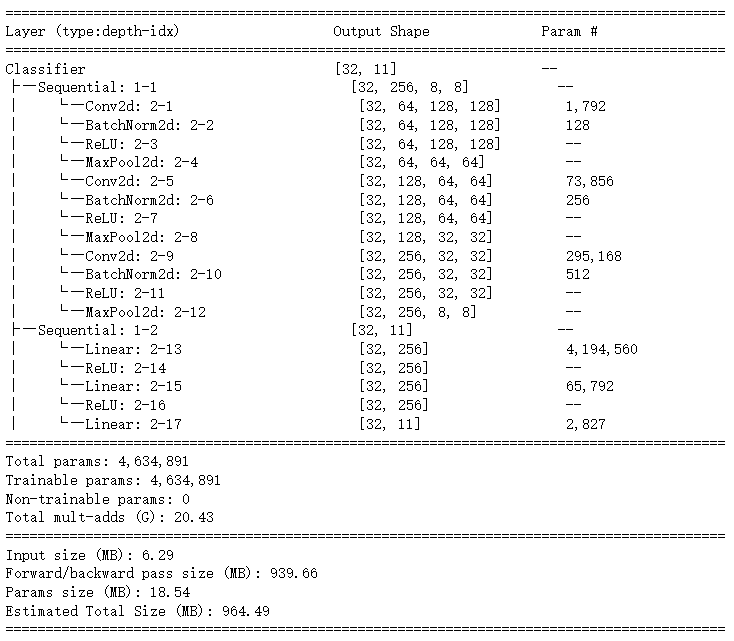
一个例子
1 | class Classifier(nn.Module): |
1x1卷积核的作用?
增加非线性映射次数,增加网络深度,提高网络的非线性能力
升维/降维,(减少卷积核参数)
经典案例(Backbone)
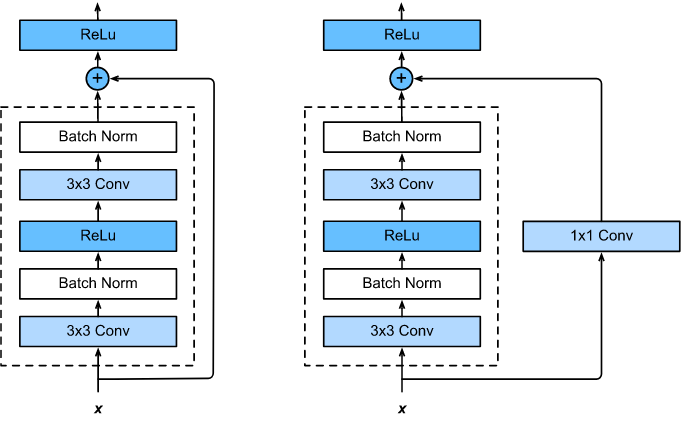
Resnet
- 解决深度神经网络的“退化”问题,“退化”指的是,给网络叠加更多的层后,性能却快速下降的情况
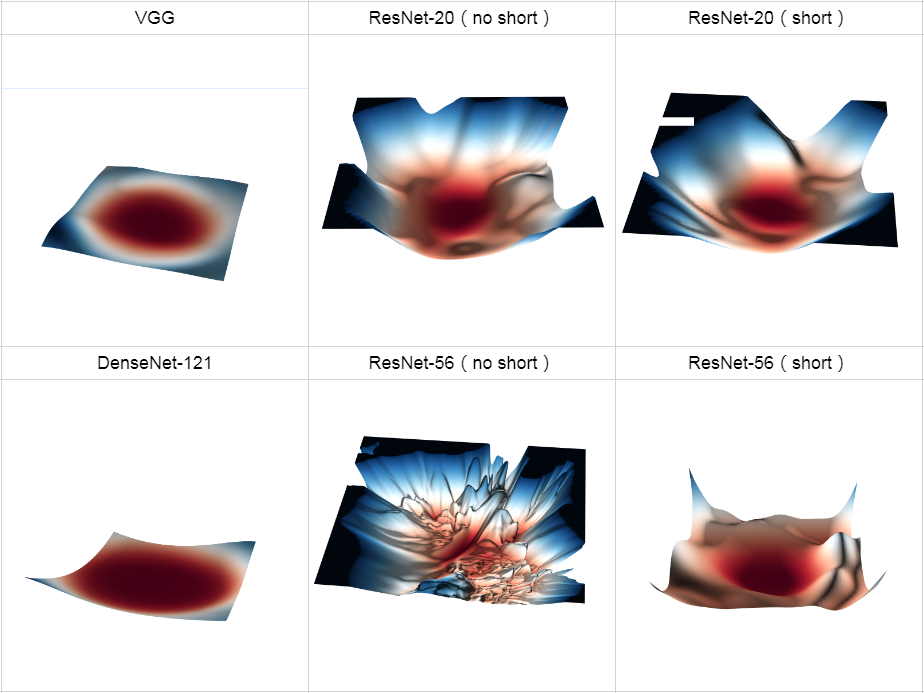
- 调整求解方法,比如更好的初始化、更好的梯度下降算法等;调整模型结构,让模型更易于优化(改变模型结构实际上是改变了error surface的形态)
- 跳跃连接 short cut

- 残差块 block
- error surface
Darknet53
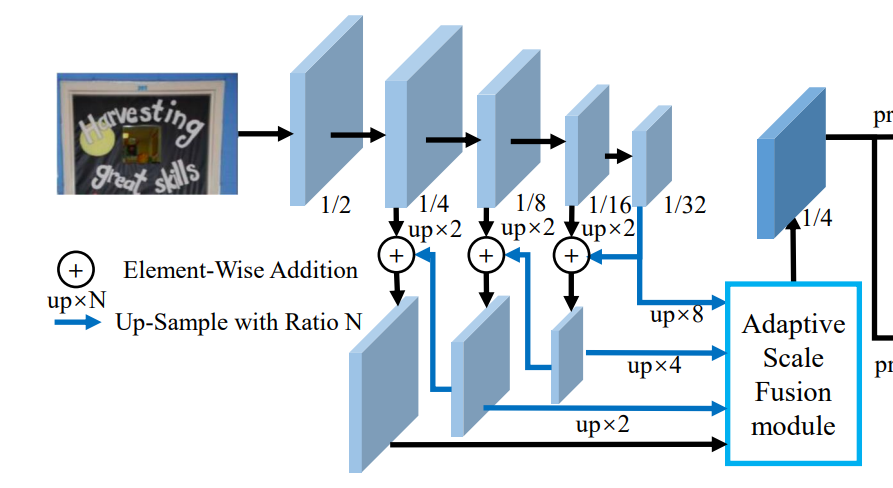
FPN
- 低层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。